![]() Dự án “Phát triển các hệ thống robot, cảm biến và phần mềm cho điều tra chất lượng cầu đường và công trình xây dựng” do PGS. La Mạnh Hùng (CNDA) và Công ty TNHH Automated Inspection Robots (AIR) Việt Nam (TCCT) thực hiện.
Dự án “Phát triển các hệ thống robot, cảm biến và phần mềm cho điều tra chất lượng cầu đường và công trình xây dựng” do PGS. La Mạnh Hùng (CNDA) và Công ty TNHH Automated Inspection Robots (AIR) Việt Nam (TCCT) thực hiện.
![]() Dự án tập trung vào việc nghiên cứu và phát triển hệ thống robot điều tra cấu sắt và cơ cấu gắn xe ô tô để tự động lấy dữ liệu mặt cầu. Dự án nhằm cung cấp giải pháp tiên phong cho tự động hoá điều tra cầu.
Dự án tập trung vào việc nghiên cứu và phát triển hệ thống robot điều tra cấu sắt và cơ cấu gắn xe ô tô để tự động lấy dữ liệu mặt cầu. Dự án nhằm cung cấp giải pháp tiên phong cho tự động hoá điều tra cầu.
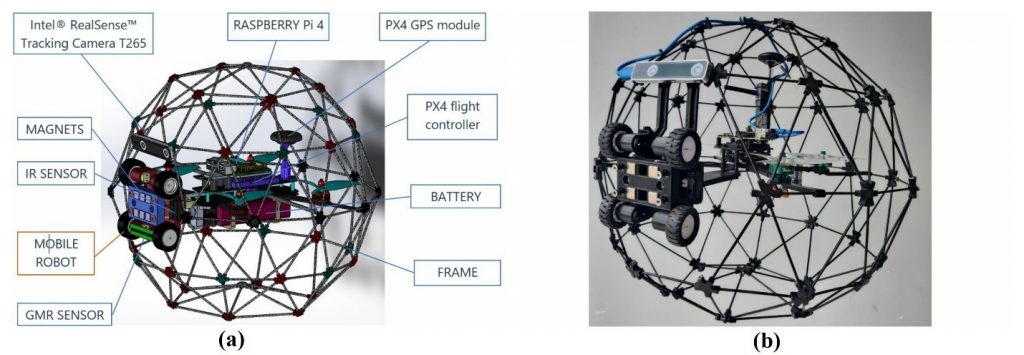
b) Robot sau khi chế tạo
![]() Mục tiêu của dự án nhằm:
Mục tiêu của dự án nhằm:
![]() Phát triển và chế tạo robot leo cầu sắt và hệ thống lấy dữ liệu NDE mặt cầu;
Phát triển và chế tạo robot leo cầu sắt và hệ thống lấy dữ liệu NDE mặt cầu;
![]() Phát triển các phần mềm xử lý dữ liệu NDE dựa trên học sâu (deep learning) và mạng nơ ron kết hợp (convolutional neural network);
Phát triển các phần mềm xử lý dữ liệu NDE dựa trên học sâu (deep learning) và mạng nơ ron kết hợp (convolutional neural network);
![]() Xây dựng khung lý thuyết và phương pháp cho phản ứng tổng hợp cảm biến NDE và chứng minh tính khả thi của nó để tạo điều kiện kiểm tra hiệu quả, chính xác và đáng tin cậy cho các cấu trúc cầu giao thông.
Xây dựng khung lý thuyết và phương pháp cho phản ứng tổng hợp cảm biến NDE và chứng minh tính khả thi của nó để tạo điều kiện kiểm tra hiệu quả, chính xác và đáng tin cậy cho các cấu trúc cầu giao thông.
![]() Sau hai năm triển khai, dự án đã đạt được các kết quả như sau:
Sau hai năm triển khai, dự án đã đạt được các kết quả như sau:
![]() Phát triển và chế tạo được cảm biến phát hiện khuyết tật như vết nứt ẩn và vết nứt bề mặt cấu trúc thép. Cảm biến có thể tích hợp với robot leo trèo và drone để lấy dữ liệu tại các vị trí cao và khó truy cập của các cầu thép
Phát triển và chế tạo được cảm biến phát hiện khuyết tật như vết nứt ẩn và vết nứt bề mặt cấu trúc thép. Cảm biến có thể tích hợp với robot leo trèo và drone để lấy dữ liệu tại các vị trí cao và khó truy cập của các cầu thép
![]() Phát triển hệ thống robot lai tạo, có thể vừa bay (lấy dữ liệu hình ảnh) và leo cầu (lấy dữ liệu kết cấu thép)
Phát triển hệ thống robot lai tạo, có thể vừa bay (lấy dữ liệu hình ảnh) và leo cầu (lấy dữ liệu kết cấu thép)
![]() Hệ thống ô tô tích hợp cảm biến GPR (ground penetrating radar) để lấy dữ liệu mặt cầu nhằm phát hiện các khuyết tật như gỉ lõi thép bên trong kết cấu bê tông.
Hệ thống ô tô tích hợp cảm biến GPR (ground penetrating radar) để lấy dữ liệu mặt cầu nhằm phát hiện các khuyết tật như gỉ lõi thép bên trong kết cấu bê tông.
![]() 15 bài đã đăng hoặc được chấp nhận đăng trên các tạp trí hàng đầu (Q1, Q2) và các hội thảo quốc tế hàng đầu về robot (rank A*, A) như ICRA và IROS.
15 bài đã đăng hoặc được chấp nhận đăng trên các tạp trí hàng đầu (Q1, Q2) và các hội thảo quốc tế hàng đầu về robot (rank A*, A) như ICRA và IROS.
![]() Đặc biệt, bài báo “Multi-directional Bicycle Robot for Bridge Inspection with Steel Defect Detection System” của nhóm dự án đã được nhận giải thưởng Best Application Paper Finalist Award tại Hội nghị robot IROS 2022 (IEEE/RSJ International Conference on Intelligent Robots and Systems), một trong những hội nghị hàng đầu và lớn nhất thế giới về robot.
Đặc biệt, bài báo “Multi-directional Bicycle Robot for Bridge Inspection with Steel Defect Detection System” của nhóm dự án đã được nhận giải thưởng Best Application Paper Finalist Award tại Hội nghị robot IROS 2022 (IEEE/RSJ International Conference on Intelligent Robots and Systems), một trong những hội nghị hàng đầu và lớn nhất thế giới về robot.
![]() PGS. La Mạnh Hùng (CNDA) chia sẻ: “Quá trình thực hiện dự án của chúng tôi có nhiều điểm thú vị, ví dụ như robot leo cầu sắt khá nhỏ vì vậy lái xe hầu như không nhìn thấy robot, nên không ảnh hưởng tới giao thông hay không phải đóng đường vì xe ô tô vẫn di chuyển với tốc độ khá cao để lấy dữ liệu GPR. Trong hai năm triển khai, nhóm dự án đã có 22 bài báo, trong đó có 15 bài đã đăng hoặc được chấp nhận đăng trên các tạp trí, hội nghị uy tín. Đặc biệt, hai trong các bài hội thảo (IEEE SII2022 và IEEE/JRS IROS2022) của nhóm đã được lựa chọn là một trong ba bài hay nhất hội nghị.”
PGS. La Mạnh Hùng (CNDA) chia sẻ: “Quá trình thực hiện dự án của chúng tôi có nhiều điểm thú vị, ví dụ như robot leo cầu sắt khá nhỏ vì vậy lái xe hầu như không nhìn thấy robot, nên không ảnh hưởng tới giao thông hay không phải đóng đường vì xe ô tô vẫn di chuyển với tốc độ khá cao để lấy dữ liệu GPR. Trong hai năm triển khai, nhóm dự án đã có 22 bài báo, trong đó có 15 bài đã đăng hoặc được chấp nhận đăng trên các tạp trí, hội nghị uy tín. Đặc biệt, hai trong các bài hội thảo (IEEE SII2022 và IEEE/JRS IROS2022) của nhóm đã được lựa chọn là một trong ba bài hay nhất hội nghị.”

![]() Dự án “Phát triển các hệ thống robot, cảm biến và phần mềm cho điều tra chất lượng cầu đường và công trình xây dựng” là một trong 22 dự án tiêu biểu được nhận tài trợ của VINIF năm 2020.
Dự án “Phát triển các hệ thống robot, cảm biến và phần mềm cho điều tra chất lượng cầu đường và công trình xây dựng” là một trong 22 dự án tiêu biểu được nhận tài trợ của VINIF năm 2020.
![]()
![]()
![]() Xin chúc mừng nhóm dự án của PGS. La Mạnh Hùng.
Xin chúc mừng nhóm dự án của PGS. La Mạnh Hùng.